Technical Details¶
In this section, we will introduce the main units of training a detector: data pipeline, model and iteration pipeline.
Data pipeline¶
Following typical conventions, we use Dataset and DataLoader for data loading
with multiple workers. Dataset returns a dict of data items corresponding
the arguments of models’ forward method.
Since the data in object detection may not be the same size (image size, gt bbox size, etc.),
we introduce a new DataContainer type in MMCV to help collect and distribute
data of different size.
See here for more details.
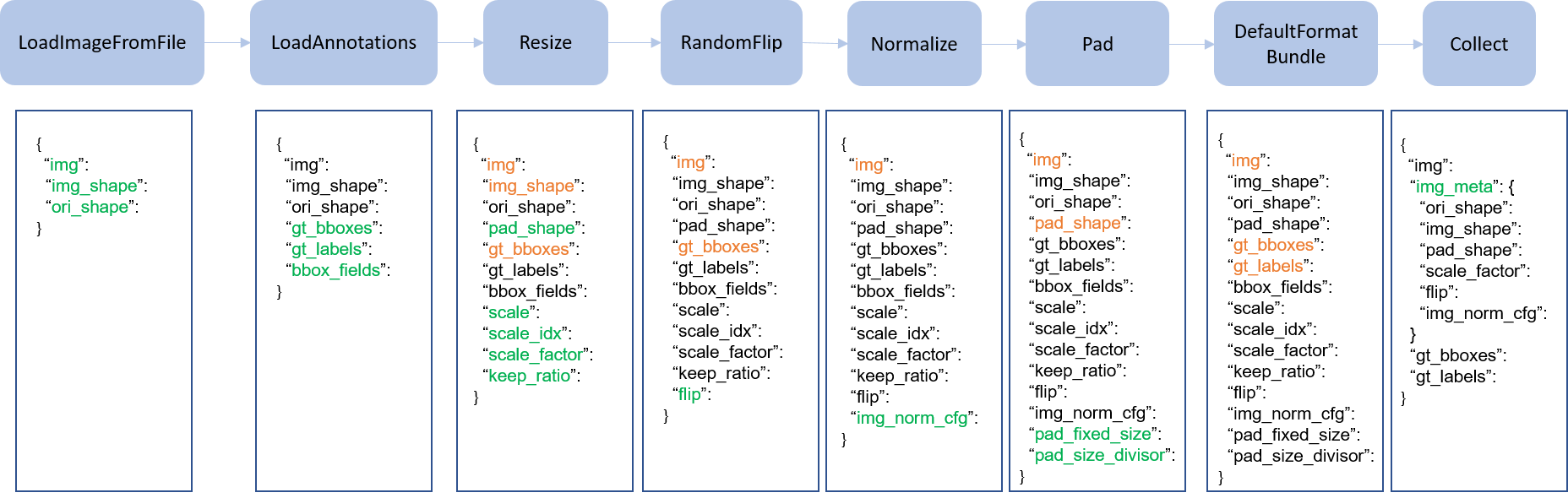
The data preparation pipeline and the dataset is decomposed. Usually a dataset defines how to process the annotations and a data pipeline defines all the steps to prepare a data dict. A pipeline consists of a sequence of operations. Each operation takes a dict as input and also output a dict for the next transform.
We present a classical pipeline in the following figure. The blue blocks are pipeline operations. With the pipeline going on, each operator can add new keys (marked as green) to the result dict or update the existing keys (marked as orange).
 pipeline figure
pipeline figure
The operations are categorized into data loading, pre-processing, formatting and test-time augmentation.
Here is an pipeline example for Faster R-CNN.
img_norm_cfg = dict(
mean=[123.675, 116.28, 103.53], std=[58.395, 57.12, 57.375], to_rgb=True)
train_pipeline = [
dict(type='LoadImageFromFile'),
dict(type='LoadAnnotations', with_bbox=True),
dict(type='Resize', img_scale=(1333, 800), keep_ratio=True),
dict(type='RandomFlip', flip_ratio=0.5),
dict(type='Normalize', **img_norm_cfg),
dict(type='Pad', size_divisor=32),
dict(type='DefaultFormatBundle'),
dict(type='Collect', keys=['img', 'gt_bboxes', 'gt_labels']),
]
test_pipeline = [
dict(type='LoadImageFromFile'),
dict(
type='MultiScaleFlipAug',
img_scale=(1333, 800),
flip=False,
transforms=[
dict(type='Resize', keep_ratio=True),
dict(type='RandomFlip'),
dict(type='Normalize', **img_norm_cfg),
dict(type='Pad', size_divisor=32),
dict(type='ImageToTensor', keys=['img']),
dict(type='Collect', keys=['img']),
])
]
For each operation, we list the related dict fields that are added/updated/removed.
Data loading¶
LoadImageFromFile
- add: img, img_shape, ori_shape
LoadAnnotations
- add: gt_bboxes, gt_bboxes_ignore, gt_labels, gt_masks, gt_semantic_seg, bbox_fields, mask_fields
LoadProposals
- add: proposals
Pre-processing¶
Resize
- add: scale, scale_idx, pad_shape, scale_factor, keep_ratio
- update: img, img_shape, *bbox_fields, *mask_fields, *seg_fields
RandomFlip
- add: flip
- update: img, *bbox_fields, *mask_fields, *seg_fields
Pad
- add: pad_fixed_size, pad_size_divisor
- update: img, pad_shape, *mask_fields, *seg_fields
RandomCrop
- update: img, pad_shape, gt_bboxes, gt_labels, gt_masks, *bbox_fields
Normalize
- add: img_norm_cfg
- update: img
SegRescale
- update: gt_semantic_seg
PhotoMetricDistortion
- update: img
Expand
- update: img, gt_bboxes
MinIoURandomCrop
- update: img, gt_bboxes, gt_labels
Corrupt
- update: img
Formatting¶
ToTensor
- update: specified by
keys.
ImageToTensor
- update: specified by
keys.
Transpose
- update: specified by
keys.
ToDataContainer
- update: specified by
fields.
DefaultFormatBundle
- update: img, proposals, gt_bboxes, gt_bboxes_ignore, gt_labels, gt_masks, gt_semantic_seg
Collect
- add: img_meta (the keys of img_meta is specified by
meta_keys) - remove: all other keys except for those specified by
keys
Test time augmentation¶
MultiScaleFlipAug
Model¶
In MMDetection, model components are basically categorized as 4 types.
- backbone: usually a FCN network to extract feature maps, e.g., ResNet.
- neck: the part between backbones and heads, e.g., FPN, ASPP.
- head: the part for specific tasks, e.g., bbox prediction and mask prediction.
- roi extractor: the part for extracting features from feature maps, e.g., RoI Align.
We also write implement some general detection pipelines with the above components,
such as SingleStageDetector and TwoStageDetector.
Build a model with basic components¶
Following some basic pipelines (e.g., two-stage detectors), the model structure can be customized through config files with no pains.
If we want to implement some new components, e.g, the path aggregation FPN structure in Path Aggregation Network for Instance Segmentation, there are two things to do.
create a new file in
mmdet/models/necks/pafpn.py.from ..registry import NECKS @NECKS.register class PAFPN(nn.Module): def __init__(self, in_channels, out_channels, num_outs, start_level=0, end_level=-1, add_extra_convs=False): pass def forward(self, inputs): # implementation is ignored pass
Import the module in
mmdet/models/necks/__init__.py.from .pafpn import PAFPN
modify the config file from
neck=dict( type='FPN', in_channels=[256, 512, 1024, 2048], out_channels=256, num_outs=5)
to
neck=dict( type='PAFPN', in_channels=[256, 512, 1024, 2048], out_channels=256, num_outs=5)
We will release more components (backbones, necks, heads) for research purpose.
Write a new model¶
To write a new detection pipeline, you need to inherit from BaseDetector,
which defines the following abstract methods.
extract_feat(): given an image batch of shape (n, c, h, w), extract the feature map(s).forward_train(): forward method of the training modesimple_test(): single scale testing without augmentationaug_test(): testing with augmentation (multi-scale, flip, etc.)
TwoStageDetector is a good example which shows how to do that.
Iteration pipeline¶
We adopt distributed training for both single machine and multiple machines. Supposing that the server has 8 GPUs, 8 processes will be started and each process runs on a single GPU.
Each process keeps an isolated model, data loader, and optimizer. Model parameters are only synchronized once at the beginning. After a forward and backward pass, gradients will be allreduced among all GPUs, and the optimizer will update model parameters. Since the gradients are allreduced, the model parameter stays the same for all processes after the iteration.
Other information¶
For more information, please refer to our technical report.